

在炎熱的夏天(tiān),啤酒、礦泉水等飲料的出貨量急劇增加。在滿足消費者解渴需求的同時,飲料等重物的處理量也随之增加,我們的物流現場就(jiù)此迎來了繁忙期。我們知道,長期以來,物流現場一直爲人手不足的“慢性病”所(suǒ)困擾,歸根究底,主要(yào / yāo)是由于(yú)裝載過(guò)量的問題。
物流是經濟的大動脈。爲了保證物流的發(fā/fà)展,經濟的繁榮,物流現場必須确保擁有充足的勞動力。該如(rú)何實現這一目标呢?對(duì)此,東芝不斷創新,研發(fā/fà)攻關出了可(kě)用(yòng)于(yú)物流現場的“自(zì)動卸貨機器人”。
一、憑借圖像識别技術,在不需要(yào / yāo)事(shì)先注冊的情況下(xià)實現運轉
“本來,物流基地多設置在方便配送的高速道路的立交橋附近。因爲公共交通來往不便,召集人手極爲困難。此外,物流現場還需要(yào / yāo)強度極大的重體力勞動,以便将工廠、倉庫通過(guò)軌道運送來的沉重貨物分送到各個目的地。因此,大多數物流現場都頗受員工留存率低、雇傭率無法保證等問題的困擾。正是基于(yú)以上訴求,我們啓動了自(zì)動卸貨機器人的研發(fā/fà)工作,迄今爲止大約有三年(nián)了。”
說出上述這番話的,正是東芝基礎設施系統株式會(huì)社的機器人和圖像安全事(shì)業負責人——柚井英人先生(shēng)。

東芝基礎設施系統株式會(huì)社
安全和自(zì)動化系統事(shì)業部
機器人和圖像安全事(shì)業負責人
柚井英人先生(shēng)
“(自(zì)動卸貨機器人的)一大特點是能(néng)準确處理重達30公斤的貨物。此外,采用(yòng)寬2.2m×長3.4m×高2.7m的尺寸設計,節省了空間,還可(kě)輕松搭載現有的設備,即使緊挨着(zhe/zhuó/zhāo/zháo)人也能(néng)夠安全運轉。特别需要(yào / yāo)說明的是,我們還實現了無需指示可(kě)自(zì)動識别貨物狀态并進行(háng / xíng)處理的特性。這樣一來,自(zì)動卸貨機器人就(jiù)能(néng)以毎分鍾不少于(yú)8箱的速度卸貨24小時,從而(ér)減輕作業人員的負擔。可(kě)以說,在物流現場采用(yòng)圖像識别技術是非常少見的。”(柚井)

産品的整體結構圖
托盤上堆積着(zhe/zhuó/zhāo/zháo)瓦楞紙箱,有的井然有序地堆積着(zhe/zhuó/zhāo/zháo),有的交錯地放置着(zhe/zhuó/zhāo/zháo),還有的則是無規則地散布各處。在以往的物流現場,我們必須事(shì)先注冊每一段貨物的形狀,之後(hòu)才能(néng)檢測對(duì)象物品。但東芝的機器人裝配了獨有的攝像頭和傳感器,可(kě)通過(guò)雷達的發(fā/fà)射速度測量距離,因而(ér)可(kě)以自(zì)動識别貨物的狀态并進行(háng / xíng)處理。
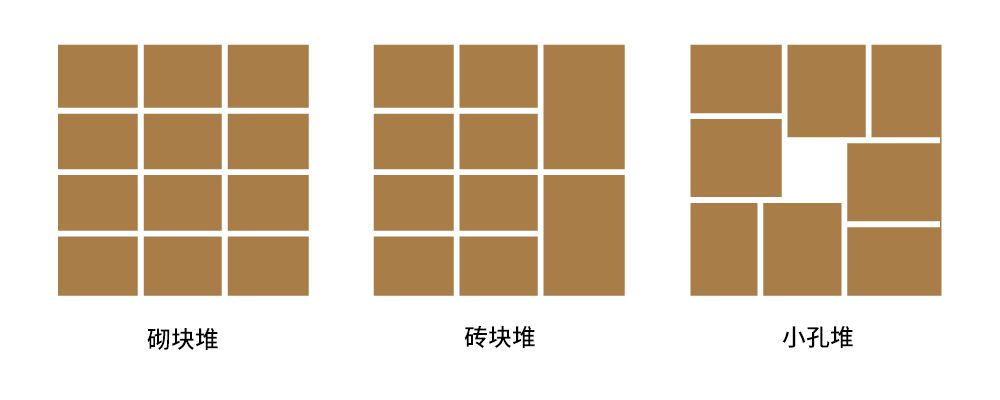
可(kě)識别多種堆放方式
“通過(guò)準确識别箱子與箱子之間的縫隙,以及箱子與蓋子對(duì)合部分的差異,即使是散亂堆放、設計各異、分段混載的貨物,自(zì)動卸貨機器人也能(néng)夠自(zì)動做相應的處理。”(柚井先生(shēng))
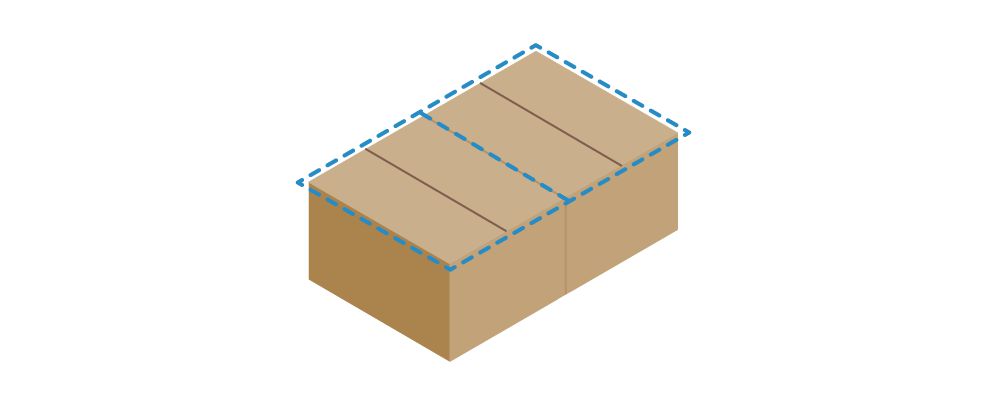
即使貨物緊挨着(zhe/zhuó/zhāo/zháo),也能(néng)夠逐個識别
二、作爲解決物流市場勞動力不足等問題的重要(yào / yāo)手段
本次研發(fā/fà)的卸貨機器人還搭載了東芝最新研發(fā/fà)的兩面握持結構1,其(qí)附帶吸盤的機械臂可(kě)輕松吸住箱子的上面和近前端側面。
1:握持臂的前端部分,即夾住貨物的結構。
從實際運用(yòng)的場景來看,機器人在識别貨物後(hòu),使用(yòng)兩面握持結構将貨物拉出并移動到帶式輸送機上。通過(guò)将貨物的重量分散到箱子的上面和側面,即使是有穿孔的瓦楞紙箱,也能(néng)夠得(dé / de / děi)到完好無損的妥善運送。
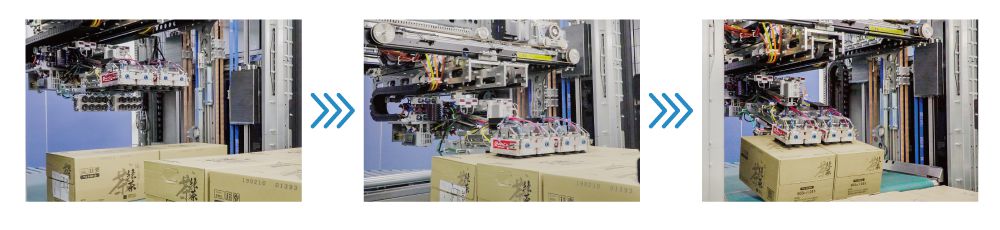
自(zì)動卸貨機器人的獨立操作
東芝機器人和圖像安全營業部組長古田健治(FURUTA KENJI)先生(shēng)介紹說:“最初的試操作是隻吸附箱子上面以便擡起(貨物),但由于(yú)各廠家(jiā)的箱子強度不同,就(jiù)發(fā/fà)生(shēng)了一些問題,如(rú)箱子上部穿孔破損、擡起時不穩定而(ér)墜落等。我們調查後(hòu)發(fā/fà)現,這是外側塗有膠水的箱子粘在一起造成的。這種“防滑處理”,是常規物流現場在用(yòng)鏟車運送貨物時,爲防止貨物散落而(ér)做的補充措施。在不同的季節,應對(duì)這些“防滑處理”也得(dé / de / děi)有所(suǒ)區别:夏季濕度高,膠水粘性差,冬季幹燥,膠水粘性強。但即使膠水粘性強,人力運送這些箱子也有散開的可(kě)能(néng)性,更何況用(yòng)機械來擡起。因此我們(将機器人)設計成上面和近前端側面兩面握持的結構,稍微按住(貨物)後(hòu)再拉動,對(duì)控制進行(háng / xíng)微調,以便剝離粘膠”。

東芝基礎設施系統株式會(huì)社
全和自(zì)動化系統事(shì)業部
機器人和圖像安全營業部 組長
古田健治先生(shēng)
“6瓶裝2升容量聚酯瓶裝飲料的瓦楞紙箱重達12公斤,如(rú)果用(yòng)人力卸貨,每小時可(kě)卸500~600個。但如(rú)果把這項工作交給機器人,那(nà)麽,根據不同的裝貨形态,每小時最多可(kě)卸600個,平均值爲450個左右。表面上看來,用(yòng)機器人卸貨的速度是降低了。但是,在使用(yòng)人力的情況下(xià),我們無法避免疲勞所(suǒ)帶來的速度減緩等問題。而(ér)24小時不變作業速度的機器人,則可(kě)以長時間高效運轉,這對(duì)物流現場來說是最大的優點。将簡單的卸貨作業交給機器人,便能(néng)夠将其(qí)他作業分配給人力資源來完成,提高物流基地的效率。此外,在物流現場,今後(hòu)我們需要(yào / yāo)處理的産品會(huì)更加多樣化、複雜化,能(néng)夠靈活運用(yòng)圖像識别技術、具有無需指示性的機器人就(jiù)會(huì)占據更大的優勢。”(古田先生(shēng))

與人合作的機器人(機器人處理重物,人處理輕便、不規則的小型貨物)
從今年(nián)3月起,這種自(zì)動卸貨機器人投入運營後(hòu),物流現場給予的評價就(jiù)非常高,“我們收到了許多反饋,希望(卸貨機器人)能(néng)處理更多形狀的貨物。我們正在考慮将這種技術應用(yòng)到裝貨的領域。”(古田先生(shēng))
爲了進一步推動物流行(háng / xíng)業的持續性發(fā/fà)展,我們的下(xià)一步目标是将機器人進行(háng / xíng)升級,在引入深度學習(deep learning)等新技術的同時,通過(guò)識别各種形狀的貨物,提高其(qí)操作精度、應用(yòng)到裝貨領域,并推廣到日本海外市場。
“我們的安全和自(zì)動化系統事(shì)業部,原本就(jiù)是在三大重點技術(即:在自(zì)動驗票閘機、點鈔機、郵件分揀機等領域建立的圖像識别技術、裝卸物品的機制,以及如(rú)何應用(yòng)這些技術和機制的計劃控制)的積累過(guò)程中不斷發(fā/fà)展起來的,我們研發(fā/fà)的科技極具親和力和适應性。随着(zhe/zhuó/zhāo/zháo)物流市場的發(fā/fà)展,我們最新研發(fā/fà)的技術也必将得(dé / de / děi)到進一步的推廣,充分解決人手不足的問題。”(柚井先生(shēng))
随着(zhe/zhuó/zhāo/zháo)電子商務日益普及,物流行(háng / xíng)業人手不足的問題也日益嚴重。解決這個問題已成了物流現場的當務之急。種種迹象表明,東芝的自(zì)動卸貨機器人活躍在物流最前線的時代,正悄然來臨!


 滬公網安備 31010102002443号
滬公網安備 31010102002443号