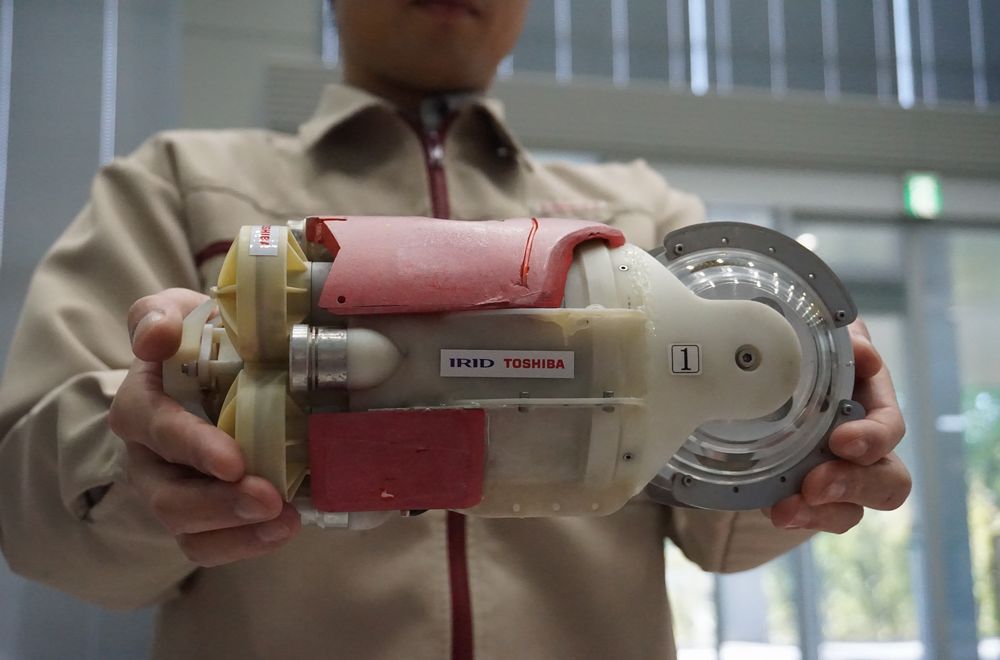

爲調查福島第一核電站3号機組安全殼内部而(ér)開發(fā/fà)的水下(xià)遊泳機器人,是一款直徑約爲13cm,長約30cm,重約2kg的小型機器人,因其(qí)在水中遊動的姿态特别而(ér)被稱爲“迷你(nǐ)版曼波魚機器人”。東芝作爲技術研究協會(huì)--國際反應堆報廢研究開發(fā/fà)機構(IRID)的成員,開發(fā/fà)了這款水下(xià)遊泳機器人。3号機組核反應堆安全殼内約有6米高的積水,因此開發(fā/fà)了可(kě)在水中遊動、用(yòng)于(yú)調查安全殼底部的水下(xià)遊泳機器人。
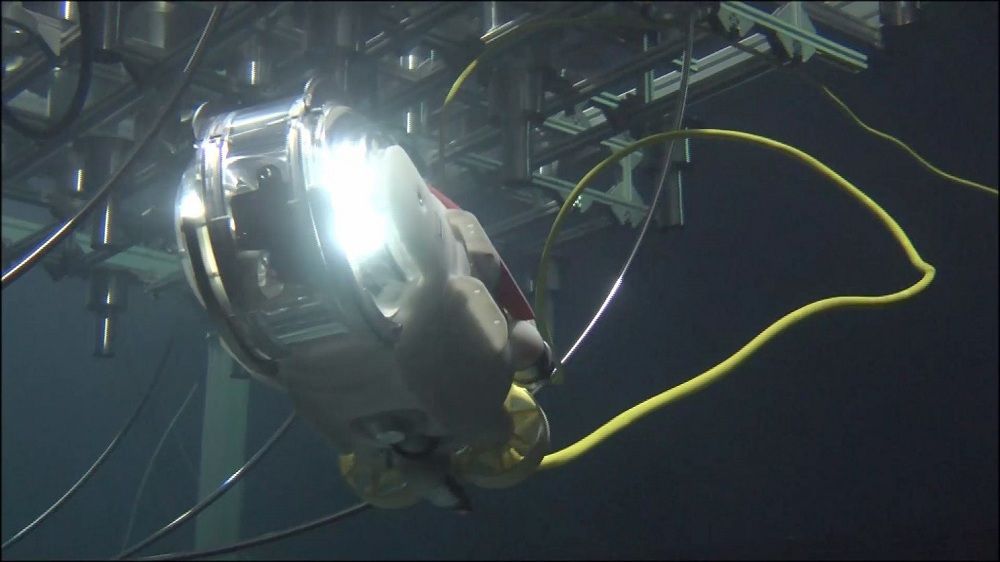
這款水下(xià)遊泳機器人可(kě)通過(guò)有線電纜在距離約500m的抗震建築内進行(háng / xíng)遠程操作。由于(yú)其(qí)前、後(hòu)方都安裝了相機和LED燈,即使在漆黑的安全殼底部也可(kě)進行(háng / xíng)調查。3号機組安全殼内部的入口十(shí)分狹窄,直徑僅約14cm,因此在提高其(qí)抗輻射性能(néng)的基礎上,改變了傳統機器人的尺寸和重量,使其(qí)實現小型化、輕量化。
作爲調查3号機組的總指揮,東芝能(néng)源系統株式會(huì)社福島重建與循環技術部的淺野真毅參與了使用(yòng)機器人進行(háng / xíng)福島第一核電站2号機組的内部調查,卻對(duì)實驗結果感到十(shí)分遺憾:在2017年(nián)2月進行(háng / xíng)的2号機組調查中,在不了解安全殼内部的情況下(xià),爲了能(néng)完成調查,設想了各種情況并展開訓練,然而(ér)機器人還是在調查過(guò)程中停止了移動。
2号機組的經驗可(kě)以繼續運用(yòng)到3号機組的操作中。與2号機組不同,3号機組的安全殼内部有積水,具備能(néng)讓機器人在三維空間中遊動的優點。雖然有可(kě)能(néng)因路線被堵住而(ér)無法到達地下(xià)層,但由于(yú)機器人自(zì)身的小型化特點和事(shì)先進行(háng / xíng)的完備的操作訓練,它能(néng)準确地抓拍到被視爲燃料碎片的物體的影像。
“當看到疑似3号機組的燃料碎片時,說實話我松了一口氣。我最擔心的是,爲讓機器人穿過(guò)核反應堆安全殼的入口而(ér)插入導管,并通過(guò)該導管把水下(xià)遊泳機器人送入水中的操作。不過(guò),經過(guò)兩個月的訓練,我相信操作者的能(néng)力。”淺野先生(shēng)對(duì)這次試驗充滿了期待。
東芝能(néng)源系統股份有限公司設備服務與應用(yòng)技術開發(fā/fà)部的松崎謙司先生(shēng)負責指揮操作,他回顧起這些經曆時說道,“爲期兩個月的訓練,日程安排得(dé / de / děi)緊湊且嚴苛,非常辛苦。我們想盡可(kě)能(néng)地模拟現場情況,但由于(yú)完全不了解受損結構的狀況,無法進行(háng / xíng)複制。因此,我們設置障礙物,制作機器人能(néng)勉強通過(guò)的網格狀物體并反複訓練,使其(qí)能(néng)熟練應對(duì)各種狀況。”
松崎先生(shēng)透露,“正因爲使用(yòng)全尺寸模型進行(háng / xíng)了嚴格訓練,本次調查才得(dé / de / děi)以實現200%的目标。因爲擔心水下(xià)機器人在調查途中無法移動,從去(qù)年(nián)年(nián)末開始我經常做噩夢。”可(kě)以說3号機組調查的成功是對(duì)技術工程師們拼命訓練的最大肯定。
水下(xià)遊泳機器人技術可(kě)達到在三維空間内自(zì)由移動
在開發(fā/fà)水下(xià)遊泳機器人的過(guò)程中,最困難的莫過(guò)于(yú)既要(yào / yāo)實現機器人的小型化,又要(yào / yāo)提高其(qí)自(zì)身的推力。由于(yú)連接機器人的電纜一邊與安全殼内壁等結構接觸一邊前進,因此需要(yào / yāo)安裝體積小且輸出功率高的電機,但這就(jiù)使得(dé / de / děi)控制電路變得(dé / de / děi)十(shí)分複雜,難以将其(qí)置于(yú)小型水下(xià)遊泳機器人中。東芝團隊開發(fā/fà)了一種摩擦力較小的新型電纜, 爲防止電纜松動而(ér)卡在結構上,調查團隊反複進行(háng / xíng)直線前進、後(hòu)退等操作訓練,以防摩擦電纜。

東芝水下(xià)遊泳機器人調查團隊
關于(yú)今後(hòu)的研究方向,淺野先生(shēng)表示,“根據這次核反應堆安全殼内部調查所(suǒ)取得(dé / de / děi)的成果,下(xià)一步我們打算進行(háng / xíng)核反應堆壓力容器的内部調查和燃料碎片取出作業等。今後(hòu)我們想爲福島第一核電站做出些貢獻。同時,對(duì)于(yú)非常喜愛機器人的工程師來說,這是一個隻有機器人才能(néng)發(fā/fà)揮出積極作用(yòng)的環境,開發(fā/fà)的産品能(néng)立即投入使用(yòng),這讓大家(jiā)動力十(shí)足。”
“3号機組順利完成目标,讓我們信心倍增。紮實地進行(háng / xíng)熟練度訓練,預估風險并采取應對(duì)措施,腳踏實地的努力終有回報。”總結這次調查,松崎先生(shēng)铿锵有力地說出這番話,“今後(hòu),我們将把重點轉移到取出裝置的設計和研究方面,爲福島第一核電站報廢反應堆的修複工作而(ér)不懈努力。”
*标注的日期爲日文原文發(fā/fà)布日期


 滬公網安備 31010102002443号
滬公網安備 31010102002443号